確実な位置把握と一貫したアプローチの支援
アプローチ方法にかかわらず、位置関係の把握を支援します。ARオーバーレイがリアルタイムナビゲーションと統合されており、解剖構造の把握および顕微鏡下手術ワークフローへの適応を支援します。これにより、外科医の経験値に関わらず、複雑な解剖構造の理解の共有を支援します。1



マイクロスコープナビゲーションが、複雑な脊椎症例における位置把握および意思決定をどのように支援するかをご確認ください。
マイクロスコープナビゲーションが手術ワークフローにどのように統合されるかをご覧いただけます。術前計画から術中アライメントまで、詳細な活用方法をご案内します。
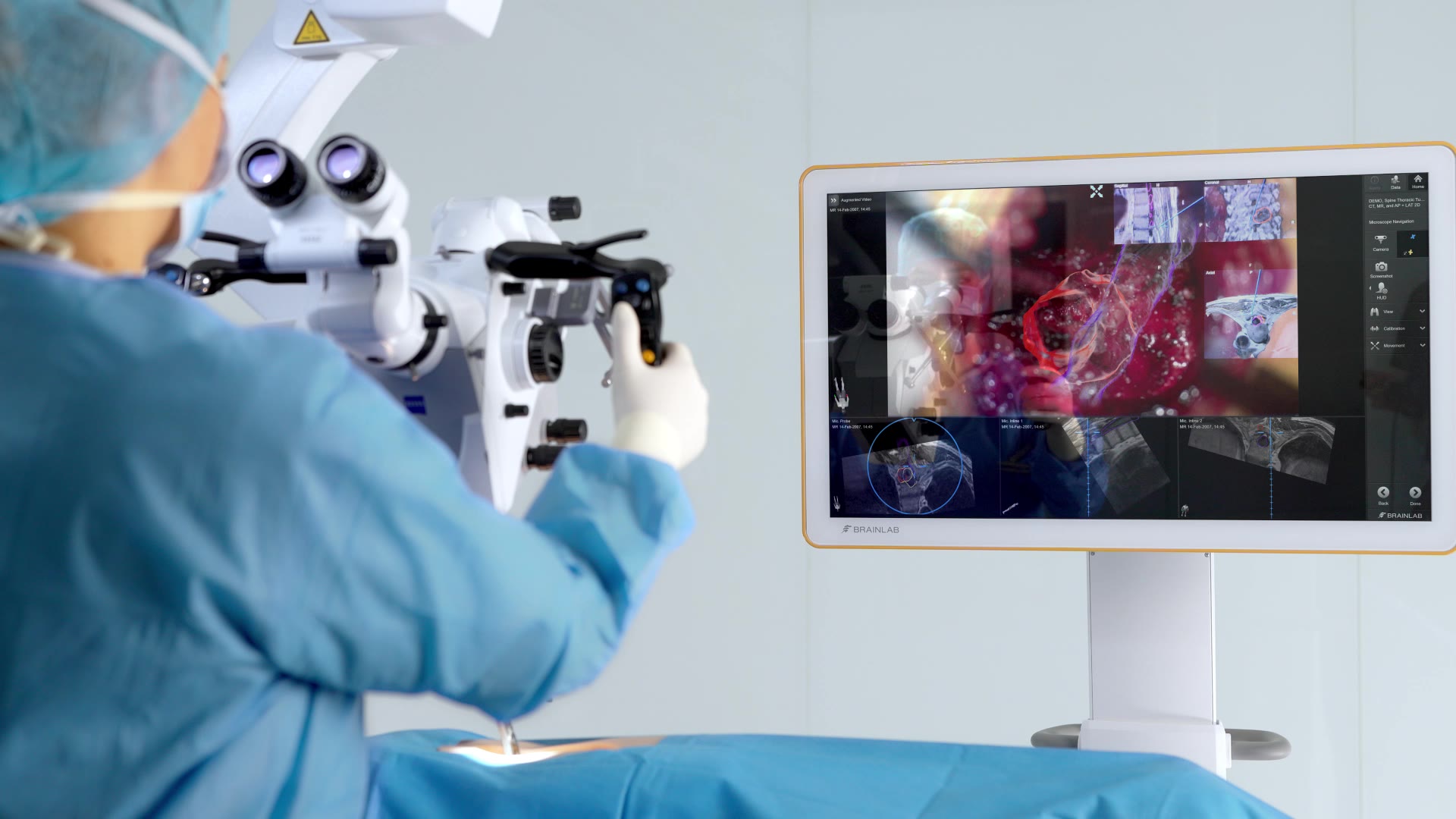
マイクロスコープナビゲーションは、重要な情報を術者の視野に直接表示し、手技への集中を支援します。
スクリーンショット提供:Marcel Ivanov(MD, PhD
スクリーンショット提供:Miriam Bopp, MD, PhD
販売名:Curve2 ナビゲーションシステム (医療機器認証番号:303AABZX00038000)
販売名:Elementsサージカルアドバンス ( 医療機器認証番号 :227AABZX00098000)
販売名:手術用顕微鏡接続キット ( 医療機器届出番号:13B1X00109100202)